Mfr Part # 410-321
ANALOG DISCOVERY 2
Digilent, Inc.
Debugging via printf (or Serial.print or, as I suggested in a previous article, snprintf) can be an extremely useful tool for seeing, quickly, what your system is doing and to zero in on the parts of your system that are, or could soon be, causing errors. This tool is not without its downsides, however, and you may have found in your experimentation with printf that calling it more than a few times significantly slows down your program. This challenge limits the times you can use printf/snprintf IRL, despite how useful it can be. In this article (as we did in part 1 and part 2), we'll do our best to make printf/snprintf blisteringly fast so that you can use it to your heart’s content!
At the end of the last article, we used a buffered USB connection to improve the rate at which a Nucleo-F042K6 could send out a 22-character message (with one integer argument) from 7.14k messages per second (which we said had an execution time of 140 μs) to 16.4k messages per second (an execution time of 88 μs).
In this article, we’ll look at a few more advanced optimization techniques that can further improve our message rate to 38.9k or even 117.8k messages per second!
In the last two articles, we’ve been comparing the various ways to send out debug messages using their execution times. This made a ton of sense in the first article when we were still using printf, since it was a blocking function. The faster we could make that function execute, the more messages we would be able to send with whatever clock cycles were left over after our processor was done with its application tasks. At the end of the first article, we had reduced the execution time of printf (assuming a 22-character message with 1 integer argument) to just 140 μs. At that rate, we could transmit 7.14k messages per second (1 msg / 140 μs = 7,142 msg/sec), minus any actual work that our processor was doing. (If our processor were only actually idle 40% of its time, for instance, then we would only be able to send out about 2.9k messages per second [40% of 7.14k].)
The notion of the “execution time” to send out a debug message became complicated, though, when we started sending out messages asynchronously, as we did in the last article. I said then that the “execution time” using snprintf, for instance, was 120 μs, as a result of calling snprintf (45 μs) and subsequently sending out our message over UART at 3 Mbaud (75 μs).
")
Although this was true in the sense that it took 120 μs from start to finish to send out one of our debug messages, it didn’t necessarily mean that we were limited to only sending out 8.3k messages per second (1 msg / 120 μs = 8,333 msg/sec). This is because we are now sending messages asynchronously; in the 75 μs it takes our first message to be sent out, our processor is already preparing another message. Or, rather, it could be preparing another message, only I didn’t show it in my example. When I reworked my code to take advantage of this asynchrony, I discovered that it now took 74 μs in total to prepare a single message this way. (The increase in snprintf’s execution time from 45 to 68 μs is the result of it being interrupted by the UART ISR 22 times, once per character in our message.)
")
What this means is that we can actually send out as many as 13.5k messages per second (1 msg / 74 μs = 13,513 msg/sec)!
So “messages per second” is a better metric for our purposes than “execution time”. Also, now that the two parts to sending out a message ([1] preparing it for transmission and [2] actually transmitting it) happen at the same time, we only really need to optimize the one that’s taking longer. It was kind of a wash in the above example, so in that second article, I decided (perhaps arbitrarily) to move to a faster means of communication: USB. After buffering our USB transmissions, I said in that article that our “execution time” was faster than before, down to 88 μs! Again, this is not quite the way we want to look at things, since the “preparing of messages by the processor” overlapped with the “sending out of USB messages”, which was happening in hardware. It would have been better for me to have shown the rate at which messages were actually being sent out, which you can see below.
")
In this graphic, you can see DIO1 and DIO2 toggling once for each message added to the USB buffer. DIO3 toggles whenever we fill up one of those buffers and send it out over USB (and you can see the USB traffic afterward on DIO2). It’s the rate of DIO3 that is most important to us, which shows us that we were able to send out 23 messages in 1.398 ms, a rate of 16.4k messages per second. It takes just as long as before to prepare our messages (there’s been no change to snprintf), so we wouldn’t actually have expected this to have improved our message rate. However, it seems that the USB software, because it’s so much faster than UART, is interrupting our processor less than the UART peripheral was, and it’s this that allows snprintf to complete more quickly than before, giving us a slightly higher message rate.
Looking at the screenshot above, it’s clear that the processor is now the thing that’s actually limiting how fast we can send out messages (you can see from the graphic above that it takes the processor almost twice as long to put 23 messages into the USB buffer as it does the USB peripheral to send out those 23 messages). We’ve already maxed out our processor’s clock speed, so to help it prepare our messages faster, we’ll have to do something fairly creative!
")
In a previous article, I suggested shortening your debug messages as a means of making printf “faster” (or, rather, of circumventing the problem of printf’s execution speed); a transfer rate of 100 kB/sec could represent only 100 messages that are 1 kB each, but it could represent 1,000 messages if those messages are only 100 B each. In fact, the logical conclusion of this technique is to send a single byte corresponding to the message format being sent (followed by any numeric values), effectively eliminating any calls to printf/snprintf entirely (though not entirely eliminating all of our formatting time). For example, we could assign the value 0x4D to the string "[W] Core %dC" (which was used previously to indicate a fictional situation in which a “warp core” was experiencing an overtemperature condition) and then send out 0x4D 0x27 0x00 (0x0027 is 39 in hexadecimal). Doing this would transmit 10 fewer bytes than if we sent out the ASCII version of the message, which would shorten the message by 77%, quadrupling our message rate in this fictional example! This series of bytes is distinctly not human-readable, of course, but it’s possible to write a computer program to parse those values and reproduce the intended message after the fact. This technique is called “serializing”, since we’re serializing the binary values of any data that would be sent following each unique message ID. (Another term might be “tokenizing”, since we’re essentially converting each message into a “token” or “message ID” before they are transmitted.)
We can, potentially, send out many more messages this way, but two problems need to be solved before this technique is viable. The first has everything to do with the fact that we’re now sending out binary data instead of ASCII characters. Consider our sample message above: 0x4D 0x27 0x00. What if our temperature value were 77ºC instead of 39ºC? “77” is 0x4D in hexadecimal, so our message would become 0x4D 0x4D 0x00. But wait, how do we know that the second 0x4D isn’t actually starting a new message? Or, put another way, what if our computer connects to our microcontroller right after the first 0x4D is sent, and now it thinks that the second 0x4D really is starting a new message? We need a way to mark the beginning and/or end of our messages, but since our data values span the gamut of every possible binary value (0x00 to 0xFF), we need to be more creative than just putting a ‘\n’ (0x0A) at the end of every message. The process of delimiting our messages is called framing.
One popular framing technique is COBS (consistent overhead byte stuffing). COBS uses 0x00 as the framing byte, replacing any actual 0x00s in your data stream with other numbers. For instance, the following string of values
0x01 0x04 0x00 0x08 0xD9 0x05 0x00 0xF4
is turned into this string of values once encoded using COBS
0x03 0x01 0x04 0x04 0x08 0xD9 0x05 0x02 0xF4 0x00
which you can test here. Notice the absence of any 0x00s in the second string except at the very end; a receiving program can now look for any zero values to know where the start/end of each message is.
A big reason for the popularity of COBS is its low overhead: for any string of data with X bytes, COBS will only add 1 + ceiling(X/254) bytes to the final message.
The second problem is this: what does our computer do if it receives the COBS-encoded message 0x03 0x4D 0x27 0x01 0x00? You can follow the link above to decode that message into the following bytes: 0x4D 0x27 0x00. Ah, it’s our overtemp message! Or, at least, it looks like it. What if we switch to a big-endian processor and now our message is 0x4D 0x00 0x27, though? What if we add a field to our message indicating whether we’re reporting ºF or ºC, and now our message is 0x4D 0x27 0x00 0x43 (0x43 is ‘C’ in ASCII)? We need a way for both systems to know the format of each message (down to how each individual byte is composed into the integers, floats, and strings that make up each message), so that every message sent is a message received.
A simple technique, as you can guess, is to just “hard-code” the data format into the program that’s receiving our data. For our over-temp message above, we can essentially write code that says, “If the first byte is 0x4D (overtemp message), the next two bytes are a uint16_t in little-endian order indicating the integer value of the temperature”. For small or bespoke systems, that solution will probably work fine (more on that later). But for larger projects, or for projects that need portability, this solution is brittle and error-prone.
A better technique is to use a known serialization format, such as MessagePack or FlatBuffers. These standards define how a series of data values can be encoded into a string of bytes such that the receiving computer knows exactly how to reconstruct each message. They eliminate potential problems when sending and receiving from different processors (such as could happen if the processors differed in endianness or native bit-width), and they also have the benefit of being popular (and therefore having a lot of support and tooling).
")
MessagePack is a serialization format that’s billed as being “like JSON, but smaller and faster.” It’s a schema-less format, like JSON, which means that every message contains all of the information needed to decode its contents.
A “schema” is a description of how to interpret a series of bytes. For instance, what’s 0x64756E6B? If that’s supposed to represent a uint32, it might be the decimal value 1,685,417,579. If it’s a float, it could be 1.8109635e22. Heck, if it’s a series of ASCII values, it could be the word “dunk”!
Some serialization formats say, “For this message, field 1 is a float.” Later on, they might say to the receiver, “Hey! Field 1 is 0x64756E6B.” Provided the receiver knows that field 1 is a float, they can interpret this value correctly. This would be a “schema-based” serialization format, since the receiver needs to know ahead of time what the “schema” or format of each message is.
Schema files are usually written separately from the program, and then a tool is used to create the proper program files (e.g., .c/cpp, .h, .py, etc.) based on that schema. Here’s a sample schema for the FlatBuffers format, which we’ll look at next:
namespace ThisExample;
table myMessage
{
field1 : uint32;
name : string;
}
root_type myMessage;
FlatBuffers uses the flatc tool to convert this schema into a corresponding .c, .cpp, or .py file (among many other languages). These files will have methods for creating and setting each field (field1 and name) in myMessage.
Other serialization formats don’t define any schema ahead of time. Instead, they might just say, “Hey! The next four bytes should be read as a string: 0x64756E6B.” The receiver knows that this is exactly the word “dunk” and they didn’t need any prior information to deduce that. This is a “schemaless” format.
Using the mpack implementation of MessagePack for C, I created a simple array of two integers to send our sample message (“Value of counter: %03d”):
enum messageType_t { COUNTS, NUM_MSG_TYPES };
char buffer[MSG_LEN] = {0};
mpack_writer_t writer;
mpack_writer_init(&writer, buffer, MSG_LEN);
mpack_start_array(&writer, 2);
mpack_write_uint(&writer, COUNTS);
mpack_write_uint(&writer, counter);
mpack_finish_array(&writer);
where the first integer denotes this as the “Value of counter: %03d” message, and the second integer is the value of counter. This is the equivalent of the JSON array [0, 976] (assuming counter is 976), and will be stored in memory as 0x92 0x00 0xCD 0x03 0xD0, which you can test here. According to the MessagePack specification, this translates to:
> 9: An array of N (<=15) elements follows |> N = 2 || > 0xxxxxxxx: 1st element is a 7-bit positive integer (0) || | > CD: 2nd element is a big-endian uint16 (0x3D0 = 976) || | | 0x92 0x00 0xCD 0x03 0xD0
(A better use of the “schemaless” format would probably have been to have made a map (i.e., a dictionary) such as {“id”: COUNTS; “counter”: 976}, but this would, of course, have taken longer to pack and also more bytes to encode.)
This data was then COBS-encoded. COBS encoding was very straightforward using this library:
cobs_encode_result result = cobs_encode(dst, dst_len, src, src_len);
The COBS encoded form of our sample message above would then be 0x02 0x92 0x04 0xCD 0x03 0xD0 0x00. (The library above won’t append the 0x00 delimiter, though, so don’t forget to add that yourself!)
The full encoding process, then, was to
In my testing, it took only 25 μs to create each message in this way and add it to the USB buffer!
")
To decode this message, the receiver conducts the same process in reverse:
These messages were also very short: only 7 bytes long (after they had been COBS encoded), meaning my 512-byte USB buffers could hold 73 of these messages. Sending these buffers out over USB happened every 2.01ms, which means that we achieved a message rate of 36.3k messages per second (73 messages / 2.01ms = 36,318 msg/sec) using mpack!
")
In fact, I was able to improve this slightly further to 38.9k messages per second by removing the pin toggling code.
")
From the graphic above, we can see that the length of time it takes to prepare a message using mpack is the current limiting factor preventing us from being able to send out more messages. At 25 μs per message, the highest data rate we could expect with mpack is 40k messages per second, which is far less than the 142.9k messages per second we could hypothetically achieve if we could somehow prepare each message in the 7 μs it would roughly take to send it out over USB. Needing a binary protocol that can encode/pack messages faster, we turn to FlatBuffers. FlatBuffers is a schema-based binary protocol (so it uses a tool called flatc to turn your schemas into the appropriate program files; see “What’s the difference between ‘schemaless’ and ‘schema-based’ serialization formats?” above) with the unique feature that scalar values can be modified in-place without needing to repack the message each time, which we enable by passing the option --gen-mutable to the flatc compiler. This is huge! Using mpack, we had to make a new message each time the value of counter changed, which took 18 μs (followed by 7 μs to do the COBS encoding). With FlatBuffers, we can create a COUNTS message once and be done; modifying the counter variable after that becomes as easy as modifying a normal struct member directly.
// Build a FlatBuffer message; buf is the uint8_t array with our data auto counterMsg = messages::GetMutableCounter(buf); // In a loop: uint32_t next = counterMsg->value()+1; counterMsg->mutate_value(next > 999 ? 0 : next);
In my tests, modifying counterMsg->value took only 820 ns and required no subsequent repacking step! That’s 22x faster than mpack!
")
Unfortunately, this didn’t exactly yield the speed-up we wanted. To be sure, we’re now pumping out messages as fast as our USB channel can handle them. Check out this screenshot, in which you can see the USB channel (DIO2) being used almost continuously.
")
Additionally, you can see DIO3 being set for 140 μs out of the 581 μs it’s taking to send out each USB buffer. DIO3 is set whenever our code is waiting for the USB to accept our next batch of data, so this means that, for the first time, we’re making messages faster than we can send them out! Our processor utilization for this high data rate is only 75.9%, leaving the remaining 24.1% for our application tasks.
So, what’s the problem? Take a look at how many times DIO1 is toggled before we send out our USB buffer; this represents the number of messages we’re able to fit in each 512-byte buffer. It’s only toggling 23 times! Our FlatBuffer messages are 20 bytes long (22 once they’ve been COBS-encoded), which means we only actually achieve a message rate of 39.6k messages per second (23 messages / 581 μs = 39,586 messages per second). Actually, it’s slightly less than that, owing, I think, to occasional delays on the USB bus; in my tests, the average message rate over the course of one second was between 35 and 37k messages per second, which may actually be slightly worse than before.
The silver lining, I suppose, is that we could theoretically achieve message rates as high as 60-70k messages per second if we switched to a communication channel that could handle 1.5 MBps or greater.,/p>
")
Okay, so we want a binary protocol that’s fast to pack and is smaller than 20 bytes (to store a single integer). At this point, we’re even ready to make some questionable choices in the pursuit of speed! Enter bitproto, a schema-based serialization format with the goals of being fast and allowing messages to store information down to the bit-level. Seriously, you can specify things like a “uint3” in your messages, which is a 3-bit unsigned integer. The bitproto library handles bit-packing/-unpacking by shifting and masking your data values to fit into the fewest number of bytes necessary.
")
This makes for extremely small messages that are extremely fast to pack and unpack. Check out the screenshot below, which shows that it takes only 620 ns to encode a bitproto message, 1.3x faster than for FlatBuffers!
")
Furthermore, since these messages have a single uint32 in them (actually, I could have made them “uint10”s, since I reset counter to 0 as soon as it exceeds 999; that would have taken better advantage of all that bitproto has to offer!) they’re only 4 bytes long (6 bytes after COBS-encoding), so we can put 85 messages into each 512 byte USB buffer, achieving a message rate of 114.2k messages per second (85 messages / 744.3 μs = 114,201 messages/second)!
")
As with mpack, I was able to improve this slightly further to 117.8k messages per second by removing the pin toggling code. Also, as with every other method so far except for FlatBuffers, our processor is fully utilized in order to achieve this data rate.
There are two downsides to keep in mind, however, that both result in bitproto maybe not being the best option for large projects or for projects that need to port to many different processor architectures.
The first is that bitproto assumes every processor has the same endianness; if the sender and receive differ (one is little-endian while the other is big-endian), you’ll get backwards data.
Second, bitproto stores no information inside each message about the contents therein. This means that any change to a message format (even if two fields are simply swapped around) would require recompiling the sending and receiving code so that they can each still access the fields correctly. By comparison, a FlatBuffer message can evolve to contain additional fields or for fields to move around within the message (following the rules here) and any code compiled against an older version will still work.
Great question! In a previous article, I mentioned how useful it could be to include the file name, function name, and line number where a debug message occurred when it was printed.
[W] temp.c[56] adcRead() Core 39C
For instance, gives us much more information than
[W] Core 39C
especially if that same debug message occurs in multiple spots in our code. With a little bit of work, we can shorten the file/function/line information, too! The key is to replace all that with the value of the Program Counter (PC), which also uniquely identifies every line of code in your program. You'd then use a program like addr2line on your host computer to convert each PC value to the appropriate file name, function name, and line number at a later time.
Using our last example, let's say the value of the PC was 0x8F4A081B when that debug message ("[W] Core 39C") was being printed. The actual values sent out over the UART/USB port (before COBS encoding) might be something like 0x8F 0x4A 0x08 0x1B 0x4D 0x00 0x27, representing first the PC (0x8F4A081B), then the message ID (0x4D), followed by the integer value for the message (0x0027).
Refer to your microcontroller's documentation to figure out how to access the PC. It may be accessible as a specific register, like on ARM, or you may need a more creative solution, such as writing a helper function that reads its return address and returns that value to the calling code. I hope you know how to read and write assembly!
")
Can we get even faster?! Of course we can! Gigabit internet connections exist, right? Though, as you can imagine, doing so may require highly specialized hardware, like that found in your expensive wireless router.
Our last examples were pushing the limits of what our processor (STM32F042K6 at 48 MHz) and our connection (USB FS) could do. How could we make either or both of those faster? One unique idea is to replace our USB connection with a GPIO port. Instead of adding the bytes in our message to a buffer to be sent out over USB, we would place each byte, in parallel, on one of our GPIO ports.
")
size_t parallel_write(const char * msg)
{
char * start = msg;
char c;
// GPIO lines idle high; set all to LOW to signal
// start of data transmission (just like a UART
// signal)
//
LL_GPIO_WriteOutputPort(GPIOA, (uint8_t)0x00);
// Place each byte of our message onto the GPIO
// port until NUL is reached.
//
while((c = *msg++) != '\0')
{
LL_GPIO_WriteOutputPort(GPIOA, (uint8_t)c);
}
// Return GPIO lines to idle value (HIGH)
//
LL_GPIO_WriteOutputPort(GPIOA, (uint8_t)0xFF);
return (size_t)(msg-start-1);
}
The data rate of this method would only be limited by how fast you could toggle a GPIO pin, which, when I tested it, was as fast as 250 ns on our current hardware. This would equate to a data rate of 32 Mbps, roughly 2.6-4x faster than USB FS.
")
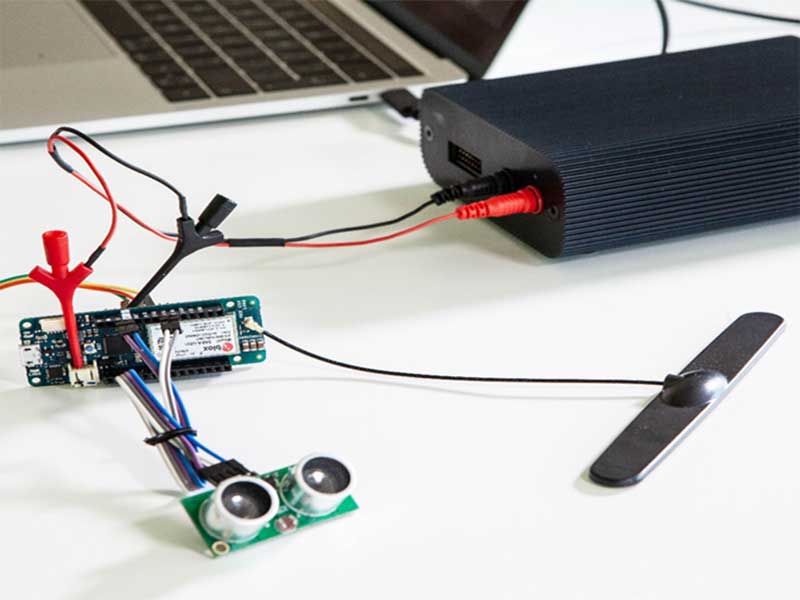
Of course, reading that data (especially if the messages were arriving at a rate of 117 KHz or higher) and then logging or printing it is another story! Your best bet is probably to capture that data using a high-speed logic analyzer such as an Analog Discovery 2 or Saleae. Many logic analyzers will allow you to record data to a file, which you could parse later, on your computer. A Teensy or a Raspberry Pi Pico (using the PIO) may also be fast enough to capture that parallel data.
Other forms of high-speed communication include SWO (on Cortex-M3 and above), USB 3.0, and Ethernet, among many others. Utilizing one of those methods will require moving to a more capable microcontroller (sorry, STM32F0!), but that may also help you write out those messages even faster.
Lastly, I’d say we also haven’t yet truly plumbed the optimization depths of our current examples! I mentioned in discussing bitproto that I could have stored our counter as a uint10 instead of a uint32. That would have required two fewer bytes to encode, possibly increasing our message rate to 164.9k messages per second (117.8 * 7/5 = 164.9k). Maybe manual escaping and framing would take less time than COBS encoding. Are we sure that the mpack/FlatBuffers/bitproto libraries couldn’t be optimized to execute more quickly? I’m not sure that we are. :)
Although it took a lot of work, we were ultimately able to make significant improvements in how fast we could send messages from our microcontroller! By removing the debug string entirely, replaced with a single byte or “token” to represent which message was being sent, we could significantly shorten not just our processing time but also how long each message took to transmit. In the end, our “Value of counter: %03d” message could be reduced to just 7 bytes, representing (more or less)
(though the exact format varied depending on whether we used MessagePack, FlatBuffers, or bitproto). This allowed us to achieve message rates as high as 38.9k messages per second, or even as high as 117.8k messages per second, provided we weren’t concerned with the portability or backwards compatibility of our messages. Getting to even higher message rates is completely possible but would require a faster processor, dedicated high-speed hardware peripherals, or both.
Here’s a summary of how far we’ve come.
")
1: For sending out a 22-character message (or equivalent token) with one integer
I hope that you’re able to incorporate one or more of the techniques above to get lots of debug messages off of your microcontroller in the future, and that those debug messages give you much useful information.
If you’ve made it this far, thanks for reading, and happy hacking!